Overview
Samantha has conducted SMART research developing the mechanical hardware, electrical systems, and software for robots used for various in-space SMART demonstrations as well as contributing to planning studies.
- Defense Innovation Unit (August 2020 - Present): Consulting as an Operations Research Analyst to aid in selection of companies for various solicitations. Co-chaired the In-Space Transportation & Logistics working group for the State of the State Industrial Base 2022 workshop and wrote corresponding section of the final report.
- Space SMART Think Tank (August 2020 - Present): Helping run a community think tank of leaders from industry, government, and academia who are working together to envision a future of space enabled by in-space servicing, manufacturing, assembly, robotics, and transportation (SMART).
- NASA in-Space Assembled Telescope (iSAT) Study (1 year): participated in this study for the National Academies’ 2020 Astronomy & Astrophysics Decadal Survey.
- NASA Jet Propulsion Laboratory (Cumulative 0.5 Year): reconfigurable satellites with serviceable scientific payloads and robotic starshade assembly.
- NASA Langley Research Center (Cumulative 1 Year): precision jigging robots for solar array assembly, heterogeneous teams of robots for truss construction, lunar crane development, modular soft robots, and stacked Stewart platform manipulators.
Consulting
|
August 2020 - Present
|
Consulting as an Operations Research Analyst for the Defense Innovation Unit to aid in selection of companies for various solicitations. Co-chaired the In-Space Transportation & Logistics working group for the State of the State Industrial Base 2022 workshop and wrote corresponding section of the final report (see below).
|
Space Servicing, Manufacturing, Assembly, Robotics, and Transportation (SMART) Think Tank
The SMART vision is fundamentally different from the way we do space operations today. In this vision, SMART capabilities transform space operations from unitary spacecraft in fixed orbits with all of the fuel and instruments that they will ever have to a routinely serviced and updated ecosystem of agile, resilient spacecraft whose capabilities are not limited by what fits in a single launch vehicle. They create an ecosystem of persistent spacecraft that are built and assembled in space, refueled and technologically updated, and have the ability to move and maneuver freely in space. Together they would form a robust in-space infrastructure of supply chain, logistics and construction."
|
August 2020 - Present
Read more about the study using the links below: |
A community think tank of leaders from industry, government, and academia who are working together to envision a future of space enabled by in-space servicing, manufacturing, assembly, robotics, and transportation (SMART).
Samantha's responsibilities on the think tank include:
|
NASA in-Space Assembled Telescope (iSAT) Study
When is it advantageous to assemble space telescopes in space rather than to build them on the Earth and deploy them autonomously from individual launch vehicles?"
|
October 2018 - July 2019

iSAT Study Face-to-Face Meeting at NASA LaRC (September 4-6 2018) [2]
|
This incredible study that submitted a white paper, about how in-space assembly could be used to build the next big space telescope, to the the National Academies’ 2020 Astronomy & Astrophysics Decadal Survey!
Samantha's responsibilities on the study included:
Read more about the study using the links below: |
NASA Jet Propulsion Laboratory
With few exceptions, existing satellites are assembled on earth and launched into space with no provision for repairing defects or upgrading their capabilities, preventing them from evolving and dooming them to becoming space junk. JPL’s Robotic Vehicles and Manipulators group (347B) is working on a project called the Persistent Robotically Operated Platform for Science (PROPS) investigating how a satellite can be modularized into discrete components that can be assembled, reconfigured, or replaced as needed by an in development robotic system to realize the idea of a fully upgradable and serviceable satellite. The initial robot architecture uses a walking behavior as its main mobility mode which by iteratively attaching and detaching either end of the arm from designated docking points on the satellite it can move itself and carry satellite instrument pallets along the main bus.
|
September - December 2019
Co-op - Robotic Vehicles and Manipulators Group |
Persistent Robotically Operated Platform for Science (PROPS)
Created the controls system for an active precision pointing system, comprised of four linear actuators connecting the top and bottom plates of the pallet, to maintain instrument attitude within ± 3 millidegrees while counteracting disturbances under 1 Hz. Conducted testing and created sequences for robotic arm maneuvers including end over end walking, instrument manipulation. Starshade Analog Robotic Assembly Demonstration Proposed and lead a robotic autonomous assembly demonstration of a 2.5-meter starshade mockup. Presented this work at the 2020 IROS Robotic In-Situ Servicing, Assembly, and Manufacturing (RISAM) Workshop. |
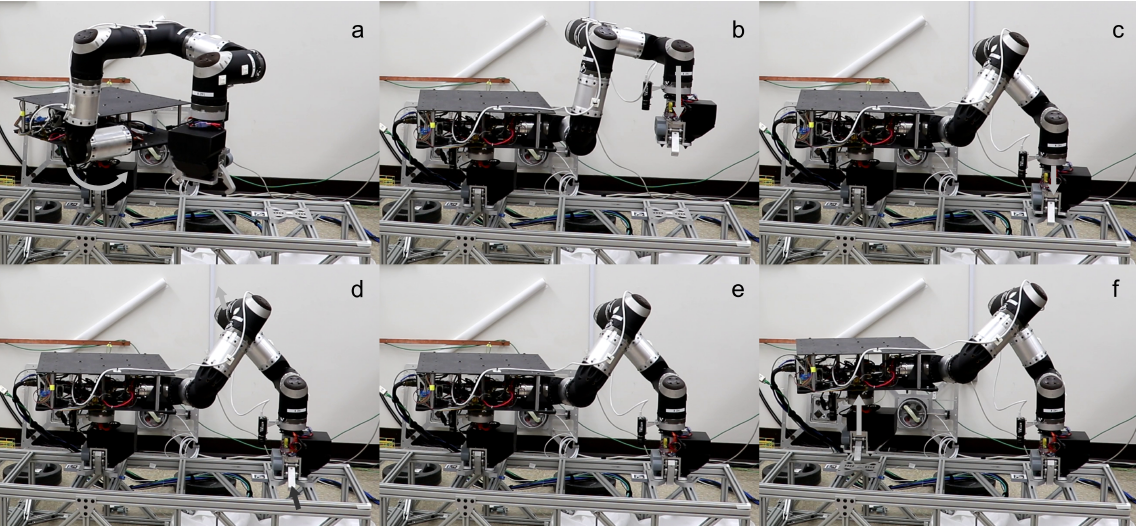
A Robotically Assembled and Serviced Science Station for Earth Observations - End Over End Robot Walking [3]
|
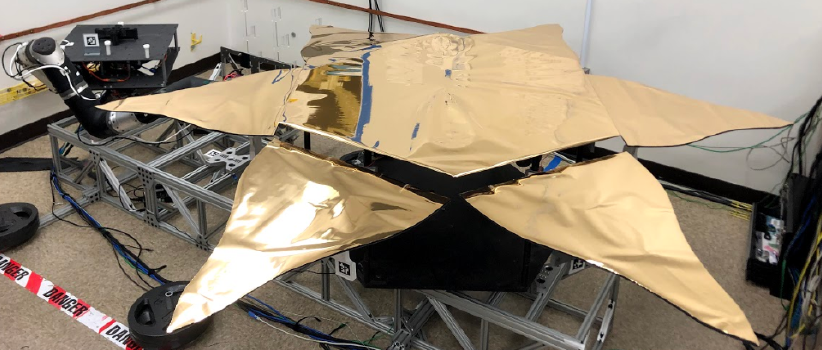
Completed robotically assembled 2.5-meter starshade analog. [4]
|
|
June - August 2018
Intern – Robotic In-Space Assembly Research and Development 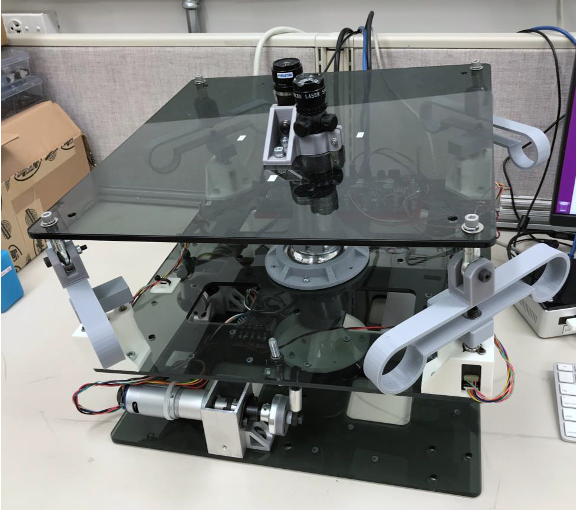
Pallet Hybrid Passive Isolation and Active Pointing System
|
Design and Testing of a Modular Satellite’s Pallet Hybrid Passive Isolation and Active Pointing System
Designed the prototype pallet hybrid isolation system to connect a variety of interchangeable scientific payloads to the main satellite. The pallet system consists of passive flexures, used to mitigate high frequency motion, coupled with actuators, used for active pointing to compensate for low frequency motion/drift, to effetely keep instruments “still” despite disturbances from the satellite truss that they are mounted to. |
NASA Langley Research Center
|
June - August 2019
Intern – Robotic In-Space Assembly Research and Development |
Lunar Crane, Lander Payload Manipulation, and Rover Changing Demonstration
Lead a team of 7 interns and contractors in completing a demonstration where a miniature version of the Lightweight Surface Manipulation System (LSMS-mini), small lunar crane, was mounted to the platform of a mock-lunar lander and performed tasks such as unloading payloads onto the back of a rover, swapping end effectors, charging the rover, and deploying ground solar panels. Highly Organized Multi-agent Enclosures (HOME) Worked with 2 other interns to develop two soft robot modules that could change their shape, translate via rolling motion produced by sequential bladder inflation, join together, and rigidize into a final shape by cooling embedded thermoplastic. |
|
May - December 2017
Co-op – Robotic Assembly of Space Structures 
Summer 2017 NINJAR 2.0 Team [4]
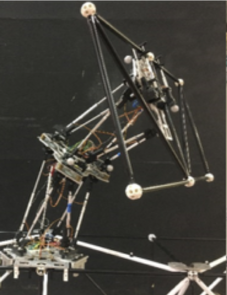
ASSEMBLERS Test - 2 Stewart Platform Stack [6]
|
Commercial Infrastructure for Robotic Assembly and Servicing (CIRAS)
Assembly of Space SystEMs By using Locomotion and Error-correction for RobustnesS (ASSEMBLERS)
|
|
May - August 2016
Intern – Robotic Assembly of Solar Array Modules by a Team of Robots 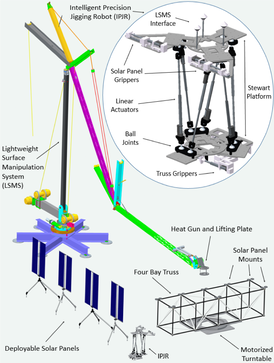
"Diagram showing workspace with the LSMS, IPJR, turntable, truss, and panels shown to relative size. Inset: IPJR detail." [7]
|
Robotic Assembly of Solar Array Modules by a Team of Robots
|
Photo Sources:
[1] https://exoplanets.nasa.gov/internal_resources/1081/
[2] https://exoplanets.nasa.gov/system/internal_resources/details/original/967_LRC-2018-B701_P-02711.jpg
[3] R. Mukherjee et al., "A Robotically Assembled and Serviced Science Station for Earth Observations," 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 2020, pp. 1-15, doi:10.1109/AERO47225.2020.9172368.
[4] S. Glassner, G. Raiola, R. Mukherjee, S. Backus, A. Brinkman, T. Setterfield, 2020. Starshade Analog Robotic Assembly Demonstration. Robotic In-Situ Manufacturing, Structural Assembly and Servicing (RISMSAS) ICRA 2020 Workshop
[5] https://www.nasa.gov/mission_pages/tdm/irma/orbital-atk-supports-ground-testing-on-ciras-at-nasa-s-langley-research-center.html
[6] http://ek2.co/
[7] Komendera, E.E., Adhikari, S., Glassner, S., Kishen, A., and Quartaro, A., 2017. Structure Assembly by a Heterogeneous Team of Robots Using State Estimation, Generalized Joints, and Mobile Parallel Manipulators. In IEEE/RSJ Conference on Intelligent Robots and Systems (p. TBD), Vancouver, BC.
[1] https://exoplanets.nasa.gov/internal_resources/1081/
[2] https://exoplanets.nasa.gov/system/internal_resources/details/original/967_LRC-2018-B701_P-02711.jpg
[3] R. Mukherjee et al., "A Robotically Assembled and Serviced Science Station for Earth Observations," 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 2020, pp. 1-15, doi:10.1109/AERO47225.2020.9172368.
[4] S. Glassner, G. Raiola, R. Mukherjee, S. Backus, A. Brinkman, T. Setterfield, 2020. Starshade Analog Robotic Assembly Demonstration. Robotic In-Situ Manufacturing, Structural Assembly and Servicing (RISMSAS) ICRA 2020 Workshop
[5] https://www.nasa.gov/mission_pages/tdm/irma/orbital-atk-supports-ground-testing-on-ciras-at-nasa-s-langley-research-center.html
[6] http://ek2.co/
[7] Komendera, E.E., Adhikari, S., Glassner, S., Kishen, A., and Quartaro, A., 2017. Structure Assembly by a Heterogeneous Team of Robots Using State Estimation, Generalized Joints, and Mobile Parallel Manipulators. In IEEE/RSJ Conference on Intelligent Robots and Systems (p. TBD), Vancouver, BC.
